I am an undergraduate student studying Computer Science in the College of Engineering at Cornell University. Currently, I'm currently a Research Assistant at Cornell's EmPRISE Lab where I work on user-aware caregiving robots under guidance of PhD student Ziang Liu and Professor Tapomayukh Bhattacharjee. I also serve as Technical Lead for CommuniCare, a startup dedicated to connecting low-income and historically underserved communities to free healthcare resources. Additionally, I'm a member of CUAD (Cornell Autonomous Drone), where I work on the computer vision algorithms that power our drones' autonomy.
My experience spans software development, machine learning, robotics, and autonomous systems.
In my free time, I enjoy playing soccer and basketball, skiing and snowboarding, hiking, cooking, and playing the piano.
Working with user functionality-aware caregiving robots. Developing an LLM-based patient controller initialization system for caregiving robots. Developing a novel reinforcement learning pipeline leverage MyoSuite's musculoskeletal models to dynamically adjust and adapt controllers to unique patient needs.
Extended two-dimensional swarm behavior to three-dimensional space and deploying in drones. Developed a 3D swarm simulation framework in PyBullet complete with custom drone models, binary sensors, unicycle controller models, and automatic data collection, and integrated with novelty search and clustering algorithms to discover emergent collective behaviors.
Working on innovative solutions to connect underserved communities to healthcare resources. Developing a digital platform to improve healthcare accessibility and outcomes for underrepresented populations.
Contributing to autonomous drone software development. Implementing computer vision algorithms and navigation systems for drone autonomy projects at Cornell University.
Tutoring students in AMC math and CS topics such as programming, data structures, and algorithms, while providing support and guidance for self-directed projects.
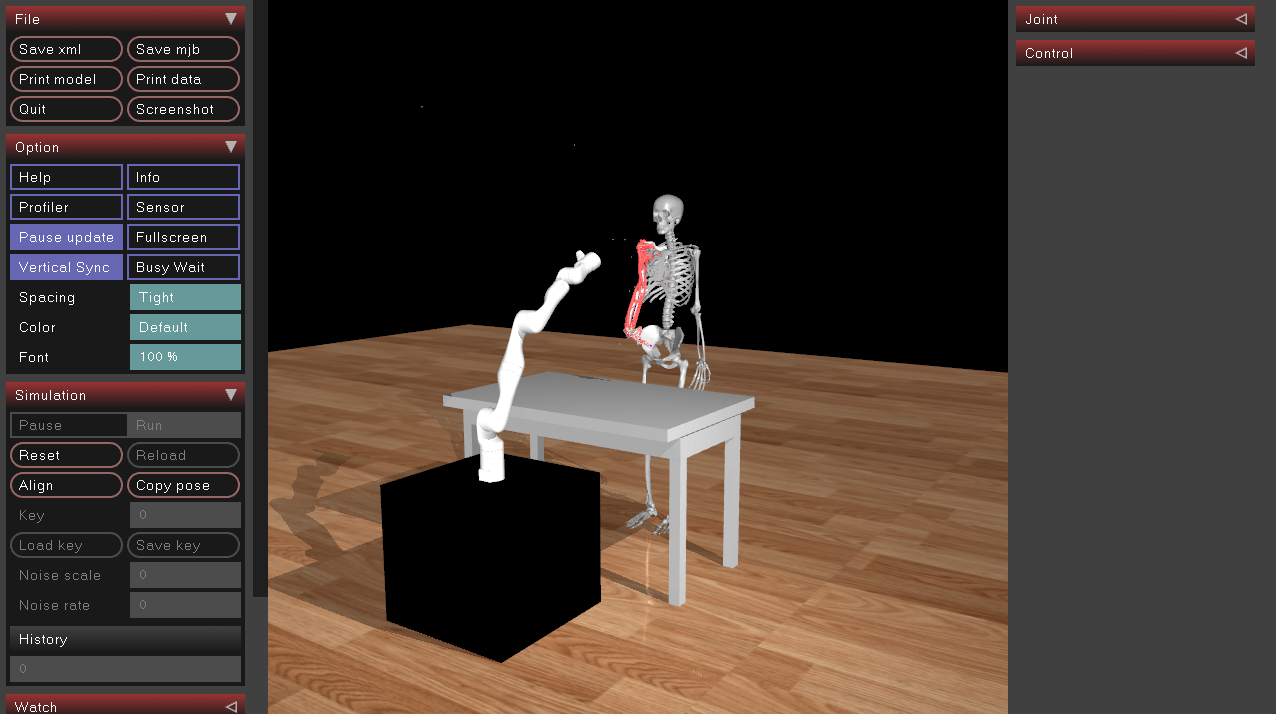
Builds upon Meta AI's MyoSuite and features a custom built MuJoCo environment wrapped in the Gymnasium API. The environment leverages MyoSuite's musculoskeletal models to create a RL pipeline for training robot arms to safely interact and adapt to individual patient biomechanics.
Built with: MyoSuite, MuJoCo, Gymnasium, Python
View on GitHub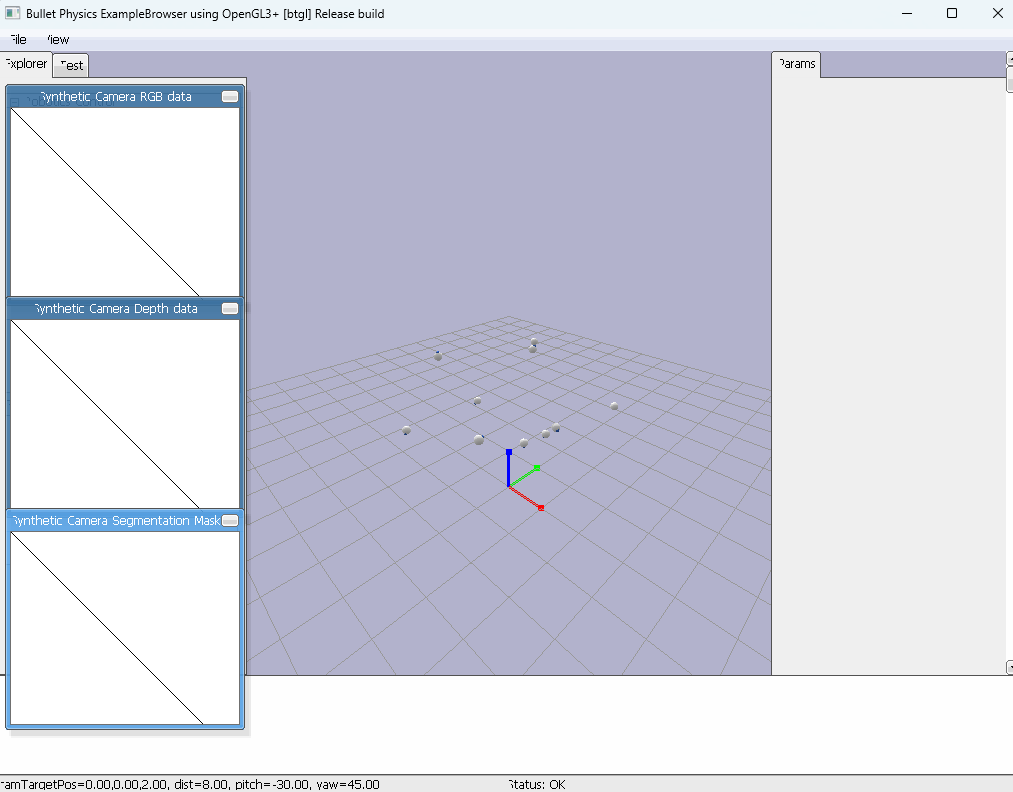
A three-dimensional swarm simulator built with PyBullet. Users are able to customize the number of drones, the length of simulation, and the length of logging. Plugging into novelty search algorithm to discover unique controller models.
Built with: PyBullet, Python
View on GitHub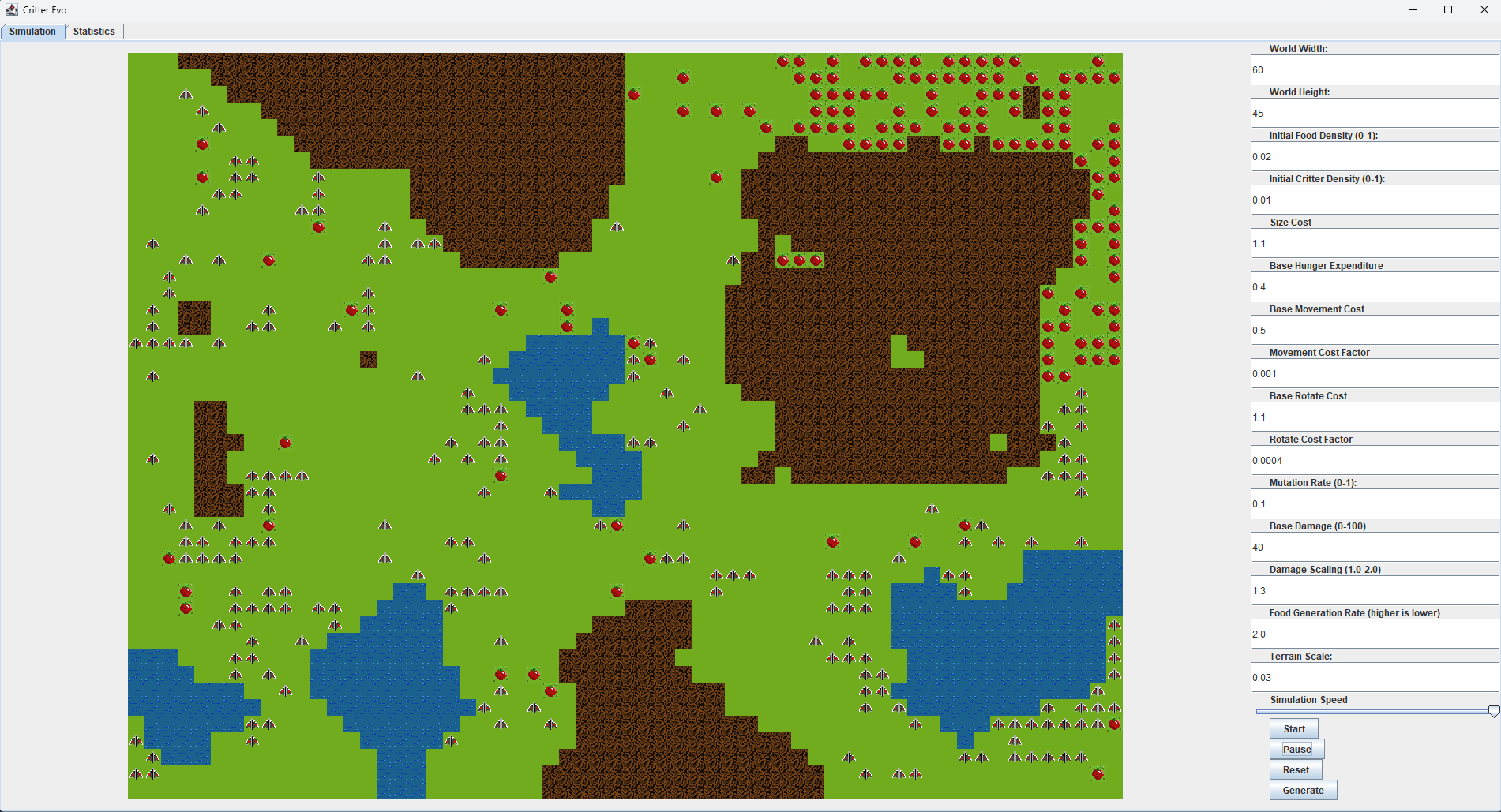
An artificial life simulator designed to model evolution and natural selection. This Java-based project simulates how organisms adapt to environmental pressures over generations.
Built with: Java
View on GitHub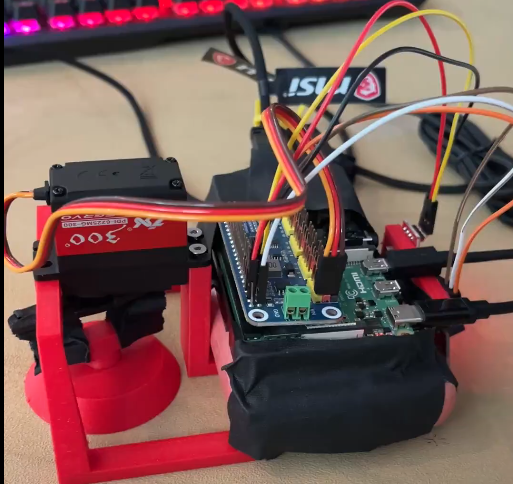
A smart motorized lock system developed during BigRed//Hacks. Won Finalist and Beginner's Prize. This IoT solution provides secure, remote access control to physical spaces.
Built with: React Native, Flask
View on GitHub
A new and improved ear training app, revamped with a different tech stack and more efficient code. Based on the 2022 RCM Piano Syllabus to help students develop aural skills.
Built with: Spring Boot, Angular, PostgreSQL
View Backend on GitHub View Frontend on GitHub
An ear training application based on the RCM 2022 Piano Syllabus. Helps music students develop aural skills through interactive exercises aligned with music education standards.
Built with: Next.js, Prisma ORM, PostgreSQL
View on GitHubLanguages:
Java, Python, JavaScript, TypeScript, HTML/CSS, SQL, OCaml, Verilog, XML
Web/App Dev:
React, Next.js, Express, Flask, Bootstrap, TailwindCSS, Spring Boot, Angular, Prisma, PostgreSQL
AI/ML/Robotics:
PyTorch, OpenCV, NumPy, PyBullet, MyoSuite, MuJoCo, Gymnasium, Stable-Baselines, depRL, ROS
Tools & Tech:
Git, GitHub Actions, Postman, Figma, Docker, Copilot, Hydra, Linux
